跳到内容
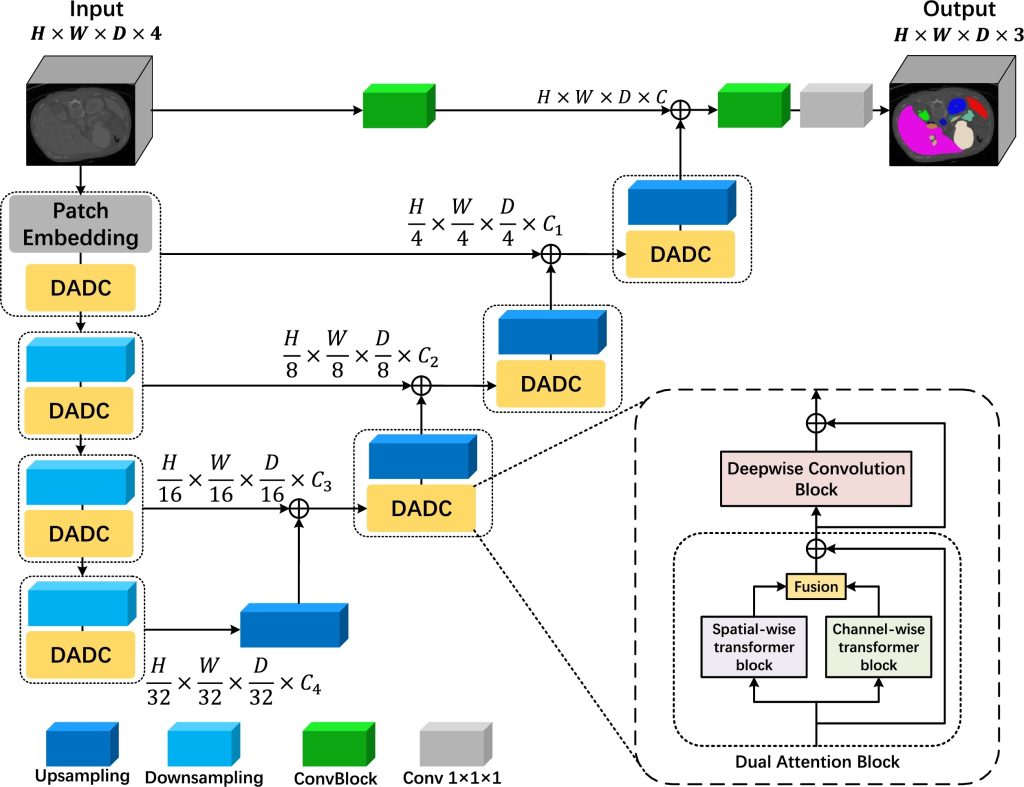 Existing approaches to 3D medical image segmentation can be generally categorized into convolution-based or transformer-based methods. While convolutional neural networks (CNNs) demonstrate proficiency in extracting local features, they encounter challenges in capturing global representations. In contrast, the consecutive self-attention modules present in vision transformers excel at capturing long-range dependencies and achieving an expanded receptive field. In this paper, we propose a novel approach, termed SCANeXt, for 3D medical image segmentation. Our method combines the strengths of dual attention (Spatial and Channel Attention) and ConvNeXt to enhance representation learning for 3D medical images. In particular, we propose a novel self-attention mechanism crafted to encompass spatial and channel relationships throughout the entire feature dimension. To further extract multiscale features, we introduce a depth-wise convolution block inspired by ConvNeXt after the dual attention block. Extensive evaluations on three benchmark datasets, namely Synapse, BraTS, and ACDC, demonstrate the effectiveness of our proposed method in terms of accuracy. Our SCANeXt model achieves a state-of-the-art result with a Dice Similarity Score of 95.18% on the ACDC dataset, significantly outperforming current methods.[......]
Existing approaches to 3D medical image segmentation can be generally categorized into convolution-based or transformer-based methods. While convolutional neural networks (CNNs) demonstrate proficiency in extracting local features, they encounter challenges in capturing global representations. In contrast, the consecutive self-attention modules present in vision transformers excel at capturing long-range dependencies and achieving an expanded receptive field. In this paper, we propose a novel approach, termed SCANeXt, for 3D medical image segmentation. Our method combines the strengths of dual attention (Spatial and Channel Attention) and ConvNeXt to enhance representation learning for 3D medical images. In particular, we propose a novel self-attention mechanism crafted to encompass spatial and channel relationships throughout the entire feature dimension. To further extract multiscale features, we introduce a depth-wise convolution block inspired by ConvNeXt after the dual attention block. Extensive evaluations on three benchmark datasets, namely Synapse, BraTS, and ACDC, demonstrate the effectiveness of our proposed method in terms of accuracy. Our SCANeXt model achieves a state-of-the-art result with a Dice Similarity Score of 95.18% on the ACDC dataset, significantly outperforming current methods.[......]继续阅读
 As electronic textiles have become more advanced in sensing, actuating, and manufacturing, incorporating smartness into fabrics has become of special interest to ubiquitous computing and interaction researchers and designers. However, innovating smart textile interfaces for numerous input and output modalities usually requires expert-level knowledge of specific materials, fabrication, and protocols. This paper presents EmTex, a construction kit based on embroidered textiles, patterned with dedicated sensing, actuating, and connecting components to facilitate the design and prototyping of smart textile interfaces. With machine embroidery, EmTex is compatible with a wide range of threads and underlay fabrics, proficient in various stitches to control the electric parameters, and capable of integrating versatile and reliable interaction functionalities with aesthetic patterns and precise designs. EmTex consists of 28 textile-based sensors, actuators, connectors, and displays, presented with standardized visual and tactile effects. Along with a visual programming tool, EmTex enables the prototyping of everyday textile interfaces for diverse life-living scenarios, that embody their touch input, and visual and haptic output properties. With EmTex, we conducted a workshop and invited 25 designers and makers to create freeform textile interfaces. Our findings revealed that EmTex helped the participants explore novel interaction opportunities with various smart textile prototypes. We also identified challenges EmTex shall face for practical use in promoting the design innovation of smart textiles.[......]
As electronic textiles have become more advanced in sensing, actuating, and manufacturing, incorporating smartness into fabrics has become of special interest to ubiquitous computing and interaction researchers and designers. However, innovating smart textile interfaces for numerous input and output modalities usually requires expert-level knowledge of specific materials, fabrication, and protocols. This paper presents EmTex, a construction kit based on embroidered textiles, patterned with dedicated sensing, actuating, and connecting components to facilitate the design and prototyping of smart textile interfaces. With machine embroidery, EmTex is compatible with a wide range of threads and underlay fabrics, proficient in various stitches to control the electric parameters, and capable of integrating versatile and reliable interaction functionalities with aesthetic patterns and precise designs. EmTex consists of 28 textile-based sensors, actuators, connectors, and displays, presented with standardized visual and tactile effects. Along with a visual programming tool, EmTex enables the prototyping of everyday textile interfaces for diverse life-living scenarios, that embody their touch input, and visual and haptic output properties. With EmTex, we conducted a workshop and invited 25 designers and makers to create freeform textile interfaces. Our findings revealed that EmTex helped the participants explore novel interaction opportunities with various smart textile prototypes. We also identified challenges EmTex shall face for practical use in promoting the design innovation of smart textiles.[......]继续阅读
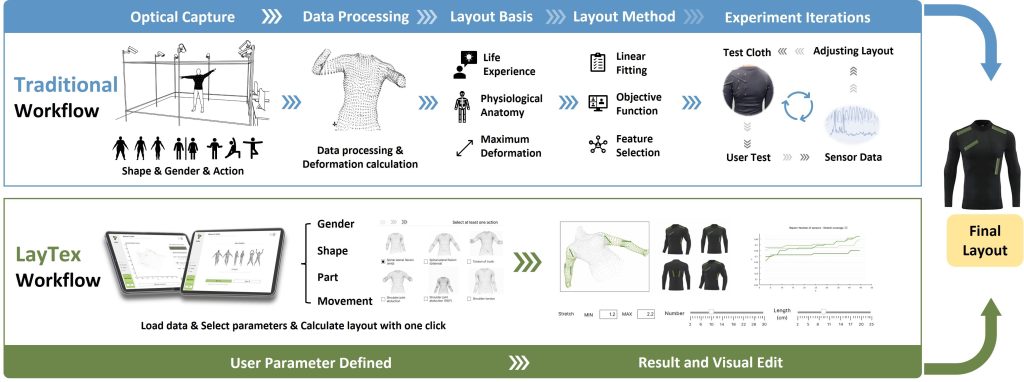 Smart textile sensors have attracted increasing interest in the domain of wearable computing for human motion monitoring. Previous studies have shown that textile sensor layout has a major impact on the effectiveness and performance of wearable prototypes. However, it is still a trick and time-consuming issue to determine textile sensor layout in a quantitative approach as it involves figuring out the number, placement, and even orientations of sensors, yet there is no streamlined digital platform or tool specifically addressing this issue. In this paper, we introduce LayTex, a digital tool capable of generating layout proposals for personalized scenarios, which aims at facilitating designers and researchers to construct prototypes efficiently. The preliminary evaluation with designers on smart garments for scoliosis indicates that LayTex has great potential to lower the barriers and simplify the process of textile prototype construction.[......]
Smart textile sensors have attracted increasing interest in the domain of wearable computing for human motion monitoring. Previous studies have shown that textile sensor layout has a major impact on the effectiveness and performance of wearable prototypes. However, it is still a trick and time-consuming issue to determine textile sensor layout in a quantitative approach as it involves figuring out the number, placement, and even orientations of sensors, yet there is no streamlined digital platform or tool specifically addressing this issue. In this paper, we introduce LayTex, a digital tool capable of generating layout proposals for personalized scenarios, which aims at facilitating designers and researchers to construct prototypes efficiently. The preliminary evaluation with designers on smart garments for scoliosis indicates that LayTex has great potential to lower the barriers and simplify the process of textile prototype construction.[......]继续阅读
 The shoulder joint plays a crucial role in the recovery of upper limb function. However, conventional wearable technologies employed for monitoring shoulder joint movements predominantly rely on inertial sensing units (IMUs), which may suffer alignment errors and compromise the freedom and wearability experienced by patients during their daily activities. This paper contributes in two facets, first, it presents the design, implementation, and technical evaluation of a new wearable system, a customized unilateral shoulder wrap that utilizes flexible and breathable textile sensors. Diverging from earlier studies, our system not only facilitates the monitoring of glenohumeral joint angles but also concurrently tracks the movement angles of the scapula. Secondly, to estimate joint angles, we propose a specific model called the Channel-Temporal Encoding Network (CTEN), which leverages Transformer and Long Short-Term Memory (LSTM) architectures. In a preliminary technical evaluation, the results demonstrate root mean square errors (RMSEs) of 2.24°and 1.13°for the glenohumeral joint and scapula, respectively. This study is intended to contribute to the development of more advanced wearables tailored for shoulder joint rehabilitation training.[......]
The shoulder joint plays a crucial role in the recovery of upper limb function. However, conventional wearable technologies employed for monitoring shoulder joint movements predominantly rely on inertial sensing units (IMUs), which may suffer alignment errors and compromise the freedom and wearability experienced by patients during their daily activities. This paper contributes in two facets, first, it presents the design, implementation, and technical evaluation of a new wearable system, a customized unilateral shoulder wrap that utilizes flexible and breathable textile sensors. Diverging from earlier studies, our system not only facilitates the monitoring of glenohumeral joint angles but also concurrently tracks the movement angles of the scapula. Secondly, to estimate joint angles, we propose a specific model called the Channel-Temporal Encoding Network (CTEN), which leverages Transformer and Long Short-Term Memory (LSTM) architectures. In a preliminary technical evaluation, the results demonstrate root mean square errors (RMSEs) of 2.24°and 1.13°for the glenohumeral joint and scapula, respectively. This study is intended to contribute to the development of more advanced wearables tailored for shoulder joint rehabilitation training.[......]继续阅读
 Running is a highly popular form of exercise, while incorrect running posture over an extended period can lead to severe knee injuries. Smart textiles have recently demonstrated significant potential for continuous motion monitoring. This study involved the design and development of a smart legging with a resistive textile sensor network to monitor lower body motion. The study consists of three main parts. Firstly, we tested textile sensors in terms of linearity and robustness to determine the basic sensor unit that can monitor the characteristics of running postures. Next, optimal sensor placement was determined through comparison experiments, and a sensor network was proposed. Finally, based on the LSTM model with data gathered from 6 participants, we developed the smart legging system that is capable of identifying three types of improper running postures and normal postures with 99.1% accuracy. The evaluation revealed that the smart legging system had the potential to help users adjust their running postures to prevent knee injury through continuous monitoring and multi-modal feedback.[......]
Running is a highly popular form of exercise, while incorrect running posture over an extended period can lead to severe knee injuries. Smart textiles have recently demonstrated significant potential for continuous motion monitoring. This study involved the design and development of a smart legging with a resistive textile sensor network to monitor lower body motion. The study consists of three main parts. Firstly, we tested textile sensors in terms of linearity and robustness to determine the basic sensor unit that can monitor the characteristics of running postures. Next, optimal sensor placement was determined through comparison experiments, and a sensor network was proposed. Finally, based on the LSTM model with data gathered from 6 participants, we developed the smart legging system that is capable of identifying three types of improper running postures and normal postures with 99.1% accuracy. The evaluation revealed that the smart legging system had the potential to help users adjust their running postures to prevent knee injury through continuous monitoring and multi-modal feedback.[......]继续阅读
 Textile sensors have demonstrated significant potential in next-generation wearable systems due to their excellent performance and unobtrusive nature. By building specialized sensing networks and algorithms, textile-based wearable systems can estimate the continuous motion angles of human joints with desirable accuracies. This article offers a systematic review aimed at identifying key challenges in this field and encouraging further applications of textile strain sensor networks within the human–computer interaction (HCI) community. To achieve this, we conducted an exhaustive literature search across four major databases: IEEE Xplore, PubMed, Scopus, and Web of Science, spanning from January 2016 to August 2023. Applying inclusion and exclusion criteria, we narrowed down 2684 results to a total of 24 relevant papers. To analyze these studies, we proposed a framework that incorporates both technical aspects – such as textile strain sensors, sensor placement, algorithms, and technical evaluations – and contextual factors like target users, wearability, and application scenarios. Our analysis uncovered two critical research gaps: First, it exists an incongruity between the development of textile-based wearables and the advancements in textile sensors. Second, there is a noticeable absence of contextual design considerations in this specific domain. To address these issues, we offer discussions and recommendations from three perspectives: 1) enhancing the robustness of textile-sensing networks, 2) improving wearability, and 3) expanding application scenarios.[......]
Textile sensors have demonstrated significant potential in next-generation wearable systems due to their excellent performance and unobtrusive nature. By building specialized sensing networks and algorithms, textile-based wearable systems can estimate the continuous motion angles of human joints with desirable accuracies. This article offers a systematic review aimed at identifying key challenges in this field and encouraging further applications of textile strain sensor networks within the human–computer interaction (HCI) community. To achieve this, we conducted an exhaustive literature search across four major databases: IEEE Xplore, PubMed, Scopus, and Web of Science, spanning from January 2016 to August 2023. Applying inclusion and exclusion criteria, we narrowed down 2684 results to a total of 24 relevant papers. To analyze these studies, we proposed a framework that incorporates both technical aspects – such as textile strain sensors, sensor placement, algorithms, and technical evaluations – and contextual factors like target users, wearability, and application scenarios. Our analysis uncovered two critical research gaps: First, it exists an incongruity between the development of textile-based wearables and the advancements in textile sensors. Second, there is a noticeable absence of contextual design considerations in this specific domain. To address these issues, we offer discussions and recommendations from three perspectives: 1) enhancing the robustness of textile-sensing networks, 2) improving wearability, and 3) expanding application scenarios.[......]继续阅读
 Autonomous agents, including service robots, require adherence to moral values, legal regulations, and social norms to interact effectively with humans. A vital aspect of this is the acquisition of ownership relationships between humans and their carrying items, which leads to practical benefits and a deeper understanding of human social norms. The proposed framework enables the robots to learn item ownership relationships autonomously or through user interaction. The autonomous learning component is based on Human-Object Interaction (HOI) detection, through which the robot acquires knowledge of item ownership by recognizing correlations between human-object interactions. The interactive learning component allows for natural interaction between users and the robot, enabling users to demonstrate item ownership by presenting items to the robot. The learning process has been divided into four stages to address the challenges posed by changing item ownership in real-world scenarios. While many aspects of ownership relationship learning remain unexplored, this research aims to explore and design general approaches to item ownership learning in service robots concerning their applicability and robustness. In future work, we will evaluate the performance of the proposed framework through a case study.[......]
Autonomous agents, including service robots, require adherence to moral values, legal regulations, and social norms to interact effectively with humans. A vital aspect of this is the acquisition of ownership relationships between humans and their carrying items, which leads to practical benefits and a deeper understanding of human social norms. The proposed framework enables the robots to learn item ownership relationships autonomously or through user interaction. The autonomous learning component is based on Human-Object Interaction (HOI) detection, through which the robot acquires knowledge of item ownership by recognizing correlations between human-object interactions. The interactive learning component allows for natural interaction between users and the robot, enabling users to demonstrate item ownership by presenting items to the robot. The learning process has been divided into four stages to address the challenges posed by changing item ownership in real-world scenarios. While many aspects of ownership relationship learning remain unexplored, this research aims to explore and design general approaches to item ownership learning in service robots concerning their applicability and robustness. In future work, we will evaluate the performance of the proposed framework through a case study.[......]继续阅读
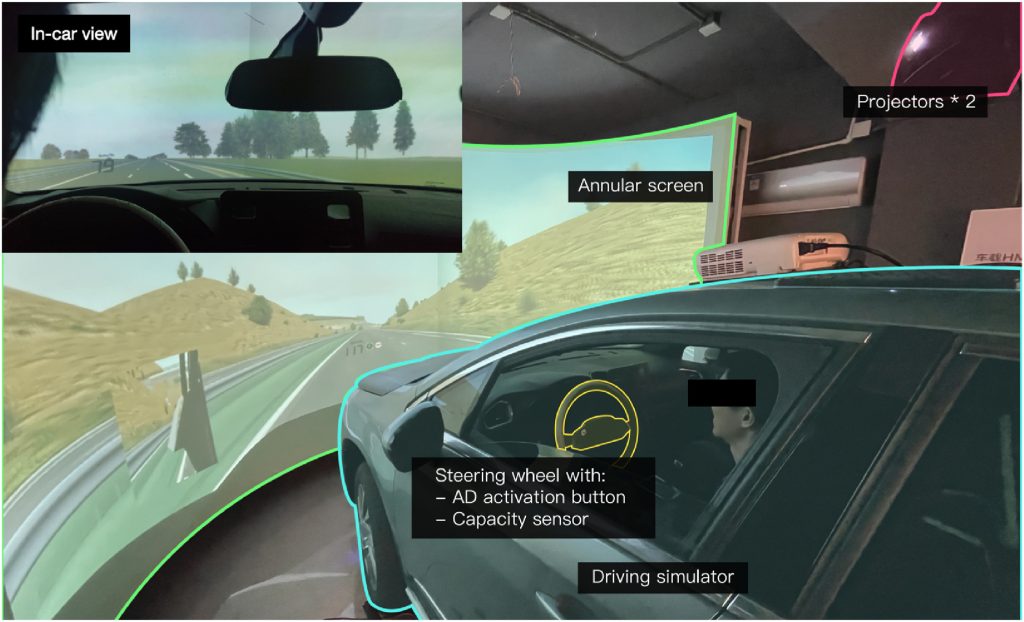 This study investigated how drivers can manage the take-over when silent or alerted failure of automated lateral control occurs after monotonous hands-off driving with partial automation. Twenty-two drivers with varying levels of prior ADAS experience participated in the driving simulator experiment. The failures were injected into the driving scenario on curved road segments, accompanied by either a visual-auditory alert or no change in HMI. Results indicated that drivers could rarely maintain lane-keeping when automated steering was disabled silently, but most drivers safely managed the alerted failure situation within the ego-lane. The silent failure yielded significantly longer take-over time and generally worse lateral control quality. In contrast, poor longitudinal control performance was observed in alerted conditions due to more brake usage. An expert-based controllability assessment method was introduced to this study. The silent lateral failure situation during monotonous hands-off driving was rated as uncontrollable, while the alerted situation was basically controllable. Participants showed their preferences for the TORs, and the importance of conveying TOR reasons was also demonstrated. [......]
This study investigated how drivers can manage the take-over when silent or alerted failure of automated lateral control occurs after monotonous hands-off driving with partial automation. Twenty-two drivers with varying levels of prior ADAS experience participated in the driving simulator experiment. The failures were injected into the driving scenario on curved road segments, accompanied by either a visual-auditory alert or no change in HMI. Results indicated that drivers could rarely maintain lane-keeping when automated steering was disabled silently, but most drivers safely managed the alerted failure situation within the ego-lane. The silent failure yielded significantly longer take-over time and generally worse lateral control quality. In contrast, poor longitudinal control performance was observed in alerted conditions due to more brake usage. An expert-based controllability assessment method was introduced to this study. The silent lateral failure situation during monotonous hands-off driving was rated as uncontrollable, while the alerted situation was basically controllable. Participants showed their preferences for the TORs, and the importance of conveying TOR reasons was also demonstrated. [......]继续阅读
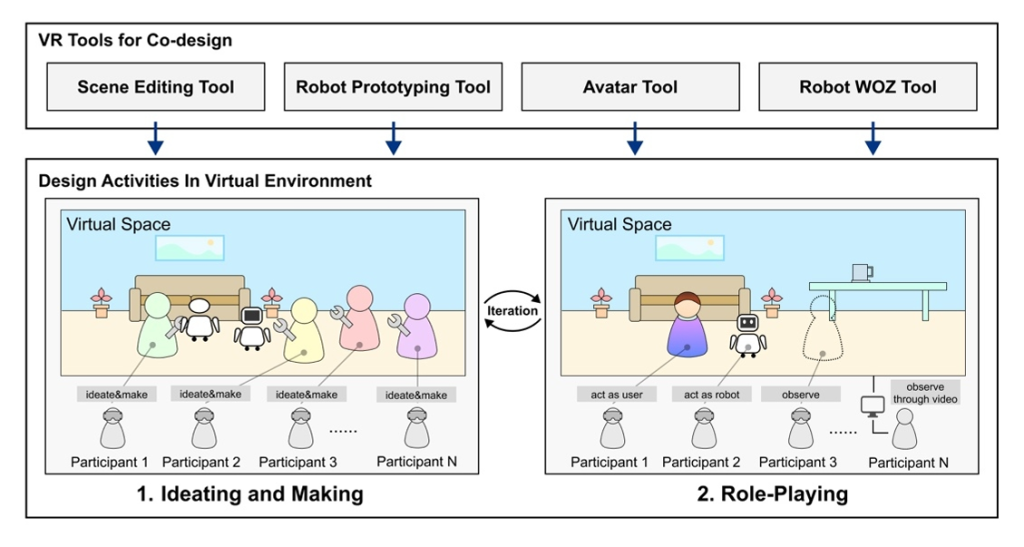 Service robots have been applied in an increasing number of scenarios, including homes, hospitals, offices, schools, hotels, etc. To ensure the usability of the interaction interface and process in the application of service robots, the design of human-robot interaction in the application of service robots involves various interaction modalities, different robot forms, and different physical behaviors of robots in space, etc. This makes it challenging to have low-cost, high-fidelity prototype methods that support design exploration in the early stages of service robot application design.Currently, many rapid prototyping techniques have been applied to the design exploration stage in the design of service robot applications, such as paper prototypes, storyboards, video prototypes, etc. However, these methods have limitations, including low fidelity and being out of the environmental context. Researchers have also been exploring new prototype methods to meet the design exploration and testing requirements for HRI design. Some studies have explored the use of VR test HRI prototypes, and most of them focus on the technical aspect, and the performance of HRI capabilities. Other studies focus on specific HRI design aspects: interactive mechanism, anthropomorphic appearance, social acceptance, and so on. Approaches focusing on these aspects are not suitable for prototyping and testing the overall interaction scenarios of service robot applications.Based on the characteristics of virtual reality technology, this paper aims to explore how virtual reality technology can be used to support multi-user collaborative design of service robot applications in a virtual environment. To address this issue, this paper proposes a system for supporting collaborative design of service robot applications. The system framework and implementation will be described in detail in the paper. Specifically, the system enables multiple users (designers or stakeholders) to enter a virtual environment in real-time using head-mounted VR devices. Users can select appropriate environment model assets based on the target application scenario and perform bodystorming "on site". Using a modular robot building tool, users can add virtual robots to the space and add or delete functional components, as well as adjust the position, size, and orientation of the components. The system's Wizard-of-OZ module allows users to control the robot's movement and component status. The Graphic UI is embedded into the physical display of the robot via WebView and supports the simulation of the Graphic UI interaction process. After completing the initial application concept ideation and virtual robot design, users can use WoZ and Role-Playing techniques to perform the human-robot interaction process to evaluate and optimize the interaction design. In addition, the recorded video of the performance can also support subsequent design discussions.The system is implemented using the Unity game engine, and users interact with the system using the Oculus Quest headsets and controllers. The design activities case based on the system will be evaluated and discussed to analyze the strengths and weaknesses of the system. Further, we discuss the limitations of this work and the future research directions for supporting the design of service robot applications using virtual reality.[......]
Service robots have been applied in an increasing number of scenarios, including homes, hospitals, offices, schools, hotels, etc. To ensure the usability of the interaction interface and process in the application of service robots, the design of human-robot interaction in the application of service robots involves various interaction modalities, different robot forms, and different physical behaviors of robots in space, etc. This makes it challenging to have low-cost, high-fidelity prototype methods that support design exploration in the early stages of service robot application design.Currently, many rapid prototyping techniques have been applied to the design exploration stage in the design of service robot applications, such as paper prototypes, storyboards, video prototypes, etc. However, these methods have limitations, including low fidelity and being out of the environmental context. Researchers have also been exploring new prototype methods to meet the design exploration and testing requirements for HRI design. Some studies have explored the use of VR test HRI prototypes, and most of them focus on the technical aspect, and the performance of HRI capabilities. Other studies focus on specific HRI design aspects: interactive mechanism, anthropomorphic appearance, social acceptance, and so on. Approaches focusing on these aspects are not suitable for prototyping and testing the overall interaction scenarios of service robot applications.Based on the characteristics of virtual reality technology, this paper aims to explore how virtual reality technology can be used to support multi-user collaborative design of service robot applications in a virtual environment. To address this issue, this paper proposes a system for supporting collaborative design of service robot applications. The system framework and implementation will be described in detail in the paper. Specifically, the system enables multiple users (designers or stakeholders) to enter a virtual environment in real-time using head-mounted VR devices. Users can select appropriate environment model assets based on the target application scenario and perform bodystorming "on site". Using a modular robot building tool, users can add virtual robots to the space and add or delete functional components, as well as adjust the position, size, and orientation of the components. The system's Wizard-of-OZ module allows users to control the robot's movement and component status. The Graphic UI is embedded into the physical display of the robot via WebView and supports the simulation of the Graphic UI interaction process. After completing the initial application concept ideation and virtual robot design, users can use WoZ and Role-Playing techniques to perform the human-robot interaction process to evaluate and optimize the interaction design. In addition, the recorded video of the performance can also support subsequent design discussions.The system is implemented using the Unity game engine, and users interact with the system using the Oculus Quest headsets and controllers. The design activities case based on the system will be evaluated and discussed to analyze the strengths and weaknesses of the system. Further, we discuss the limitations of this work and the future research directions for supporting the design of service robot applications using virtual reality.[......]继续阅读
 Traditional Chinese embroideries have a long history and take the most important role in the textile Intangible Cultural Heritage (ICH) in China. At the same time, smart textiles have become a dominant trend in textiles development and the thermochromic textile interface resulted in increasing explorations. In order to study how computational thermochromic interface may contribute to the transmission of traditional embroidery craftsmanship, we investigated a novel color-changing embroidery interface and explored various prototypes in multiple scenarios including future cockpit, fitness promotion, and household items.[......]
Traditional Chinese embroideries have a long history and take the most important role in the textile Intangible Cultural Heritage (ICH) in China. At the same time, smart textiles have become a dominant trend in textiles development and the thermochromic textile interface resulted in increasing explorations. In order to study how computational thermochromic interface may contribute to the transmission of traditional embroidery craftsmanship, we investigated a novel color-changing embroidery interface and explored various prototypes in multiple scenarios including future cockpit, fitness promotion, and household items.[......]继续阅读
