
Keeping in the lane! Investigating drivers’ performance handling silent vs. alerted lateral control failures in monotonous partially automated driving
Yiwen Zhang, Xinyan Zhou, Wenjia Wang, Yuanda Hu, Xiaohua Sun
International Journal of Industrial Ergonomics (2023)
摘要/Abstract
本研究调查了在部分自动化的单调免提驾驶后发生自动横向控制的静音或警报故障时,驾驶员如何管理接管。22 名具有不同 ADAS 经验水平的驾驶员参与了驾驶模拟器实验。这些故障被注入到弯曲路段的驾驶场景中,伴随着视觉听觉警报或 HMI 没有变化。结果表明,当自动转向被静默禁用时,驾驶员很少能保持车道保持,但大多数驾驶员在自主车道内安全地管理警报故障情况。无声失效导致接管时间明显更长,横向控制质量通常更差。相比之下,由于制动器使用较多,在警报条件下观察到纵向控制性能不佳。本研究引入了一种基于专家的可控性评估方法。单调的放手驾驶时无声的横向故障情况被评为不可控,而警觉情况基本可控。参与者展示了他们对 TOR 的偏好,并且还展示了传达 TOR 原因的重要性。
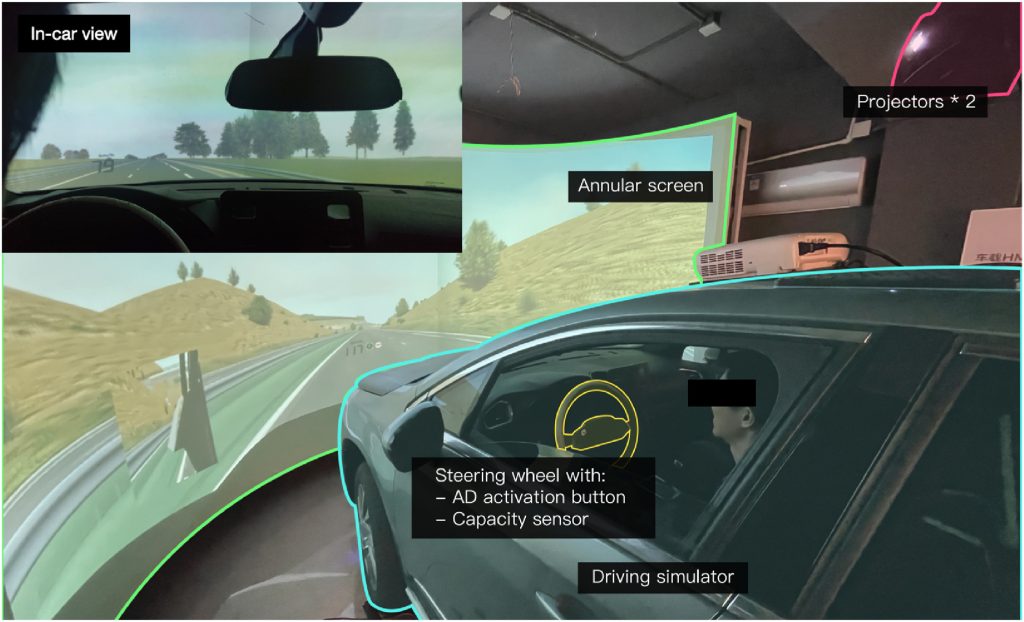
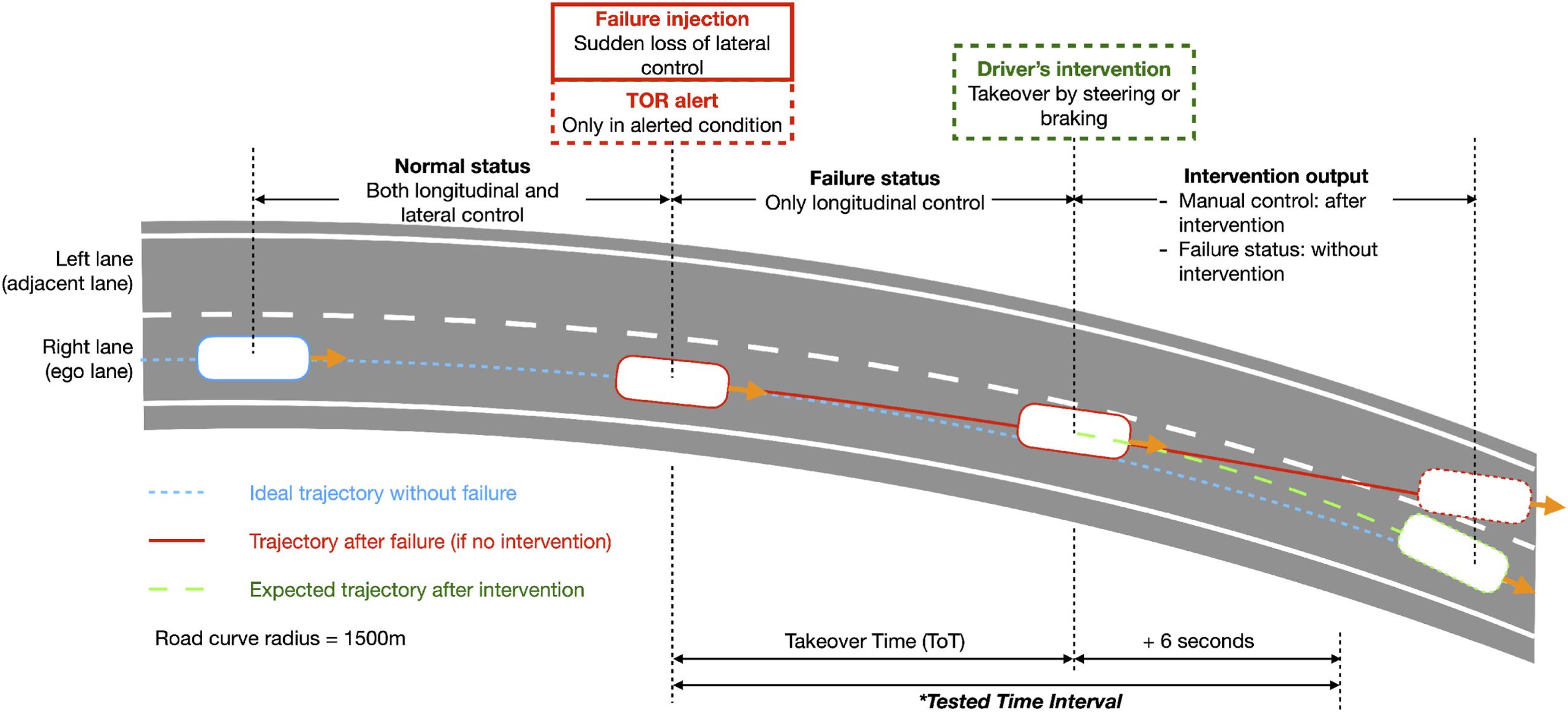
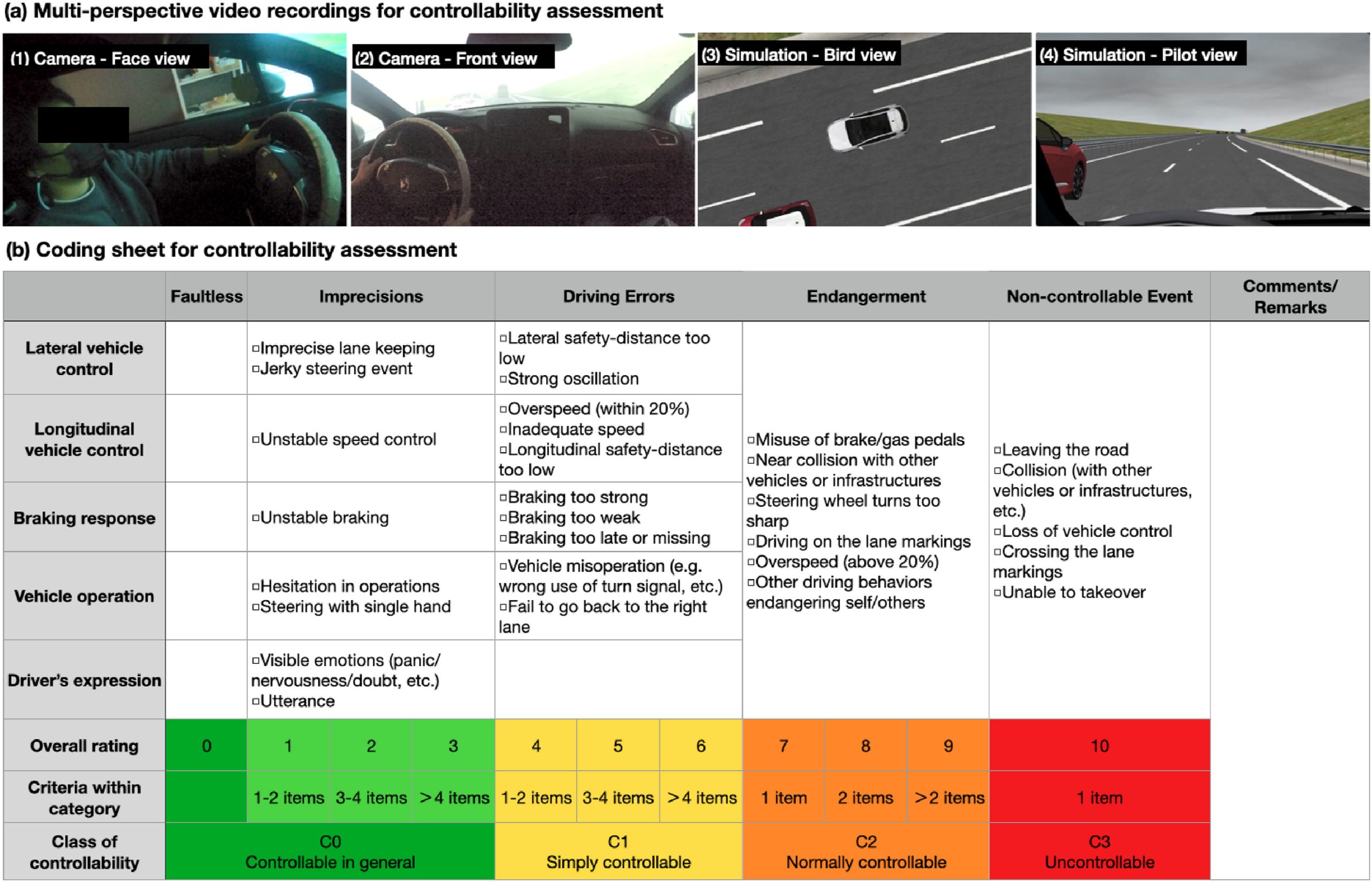
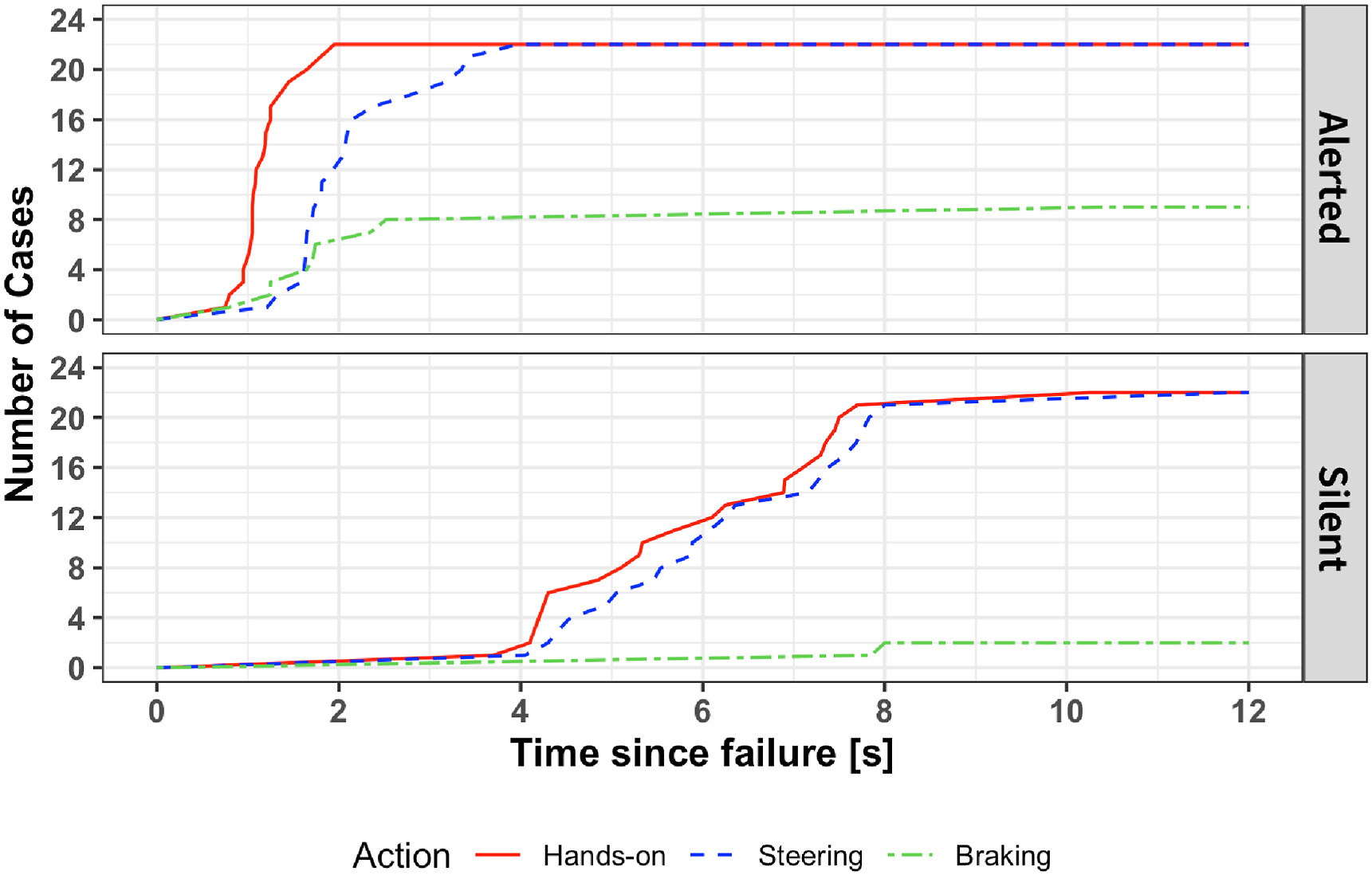
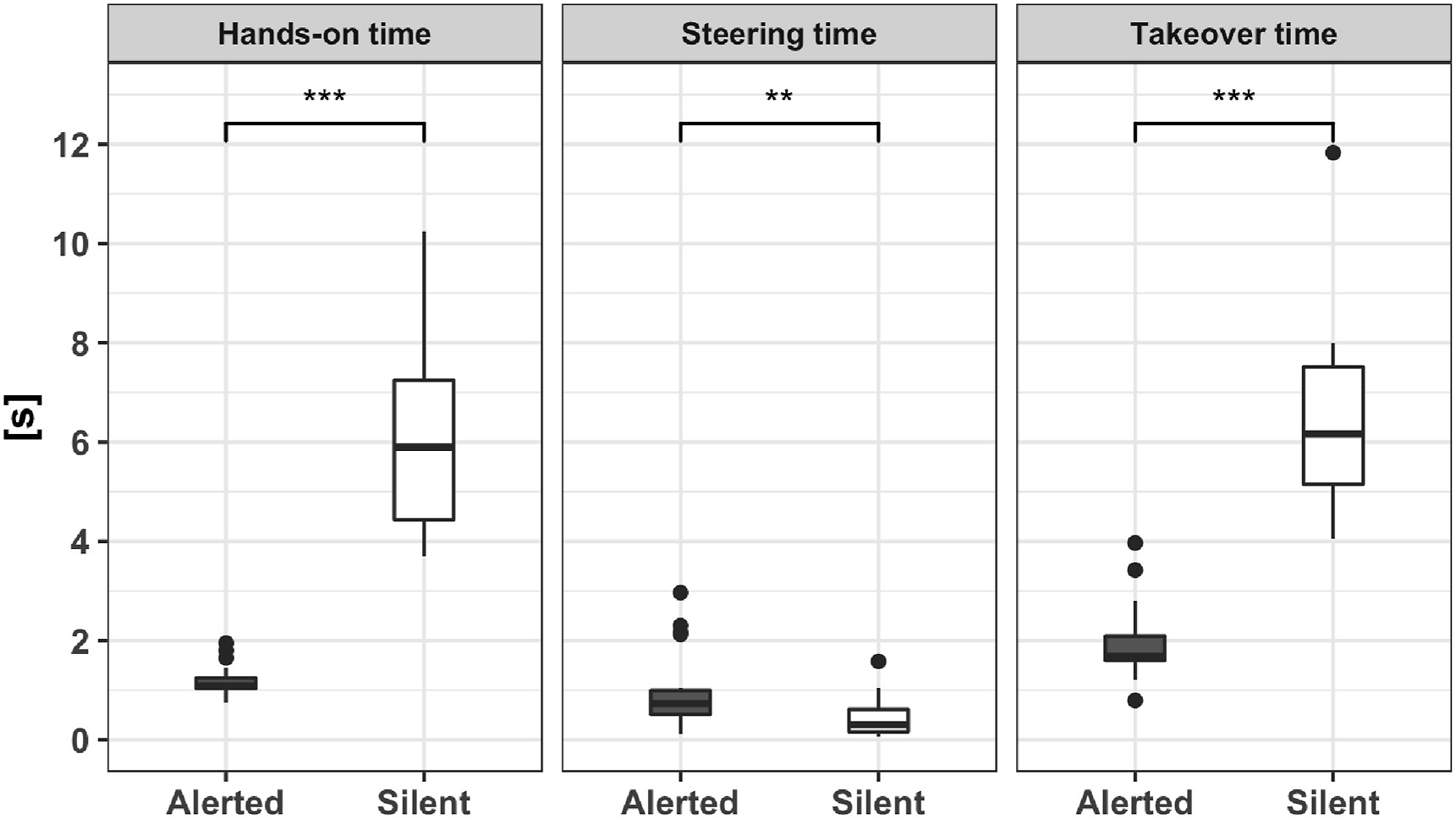
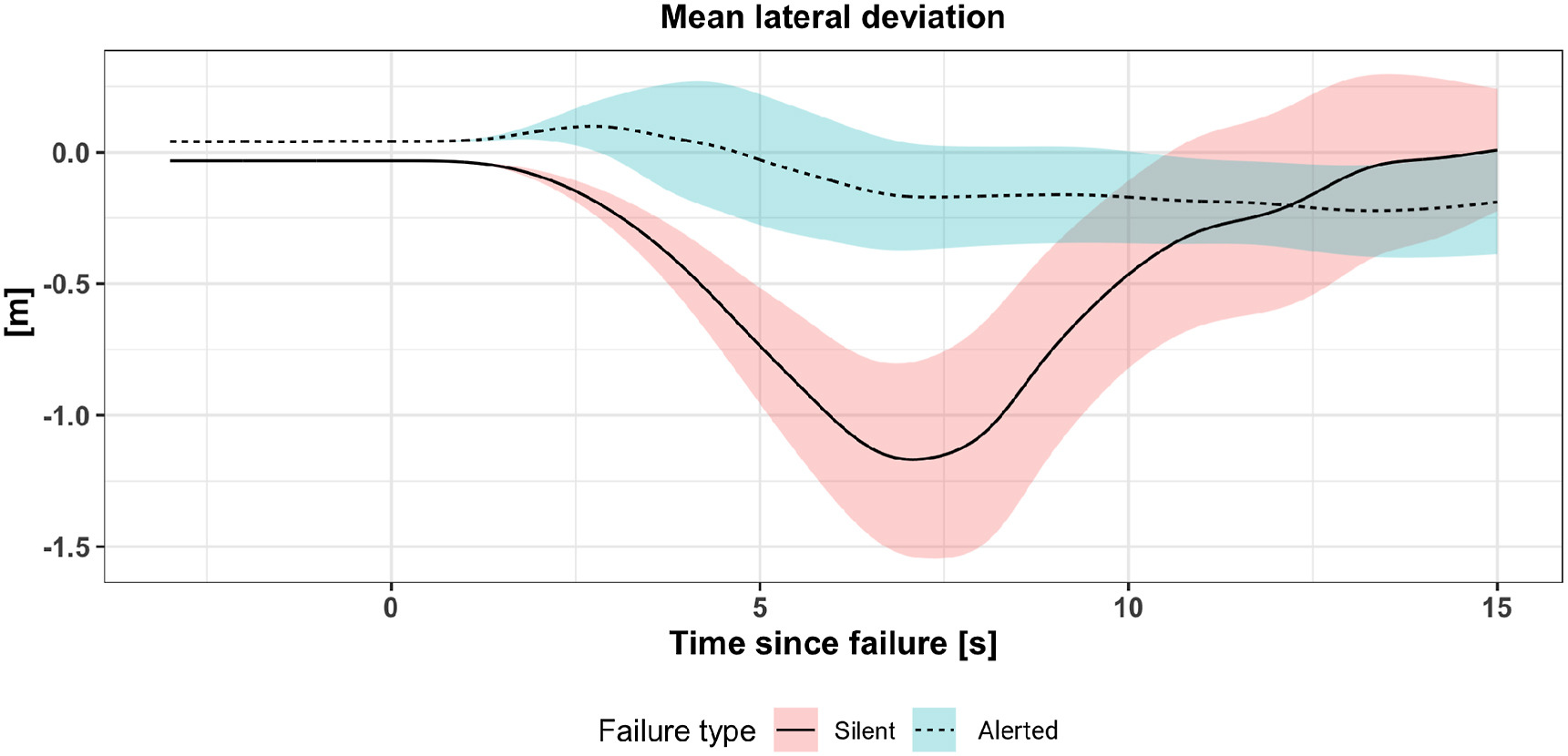
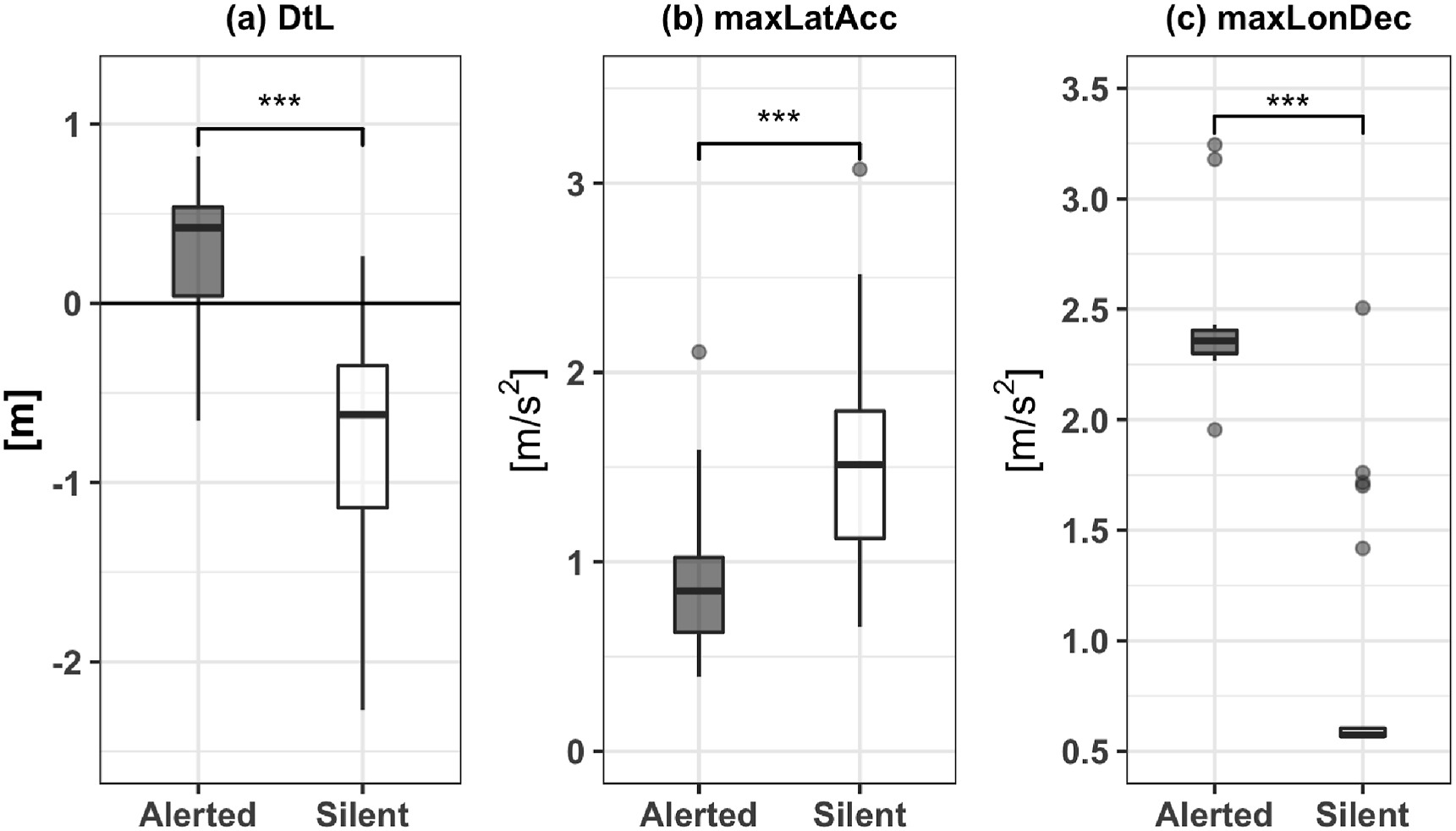
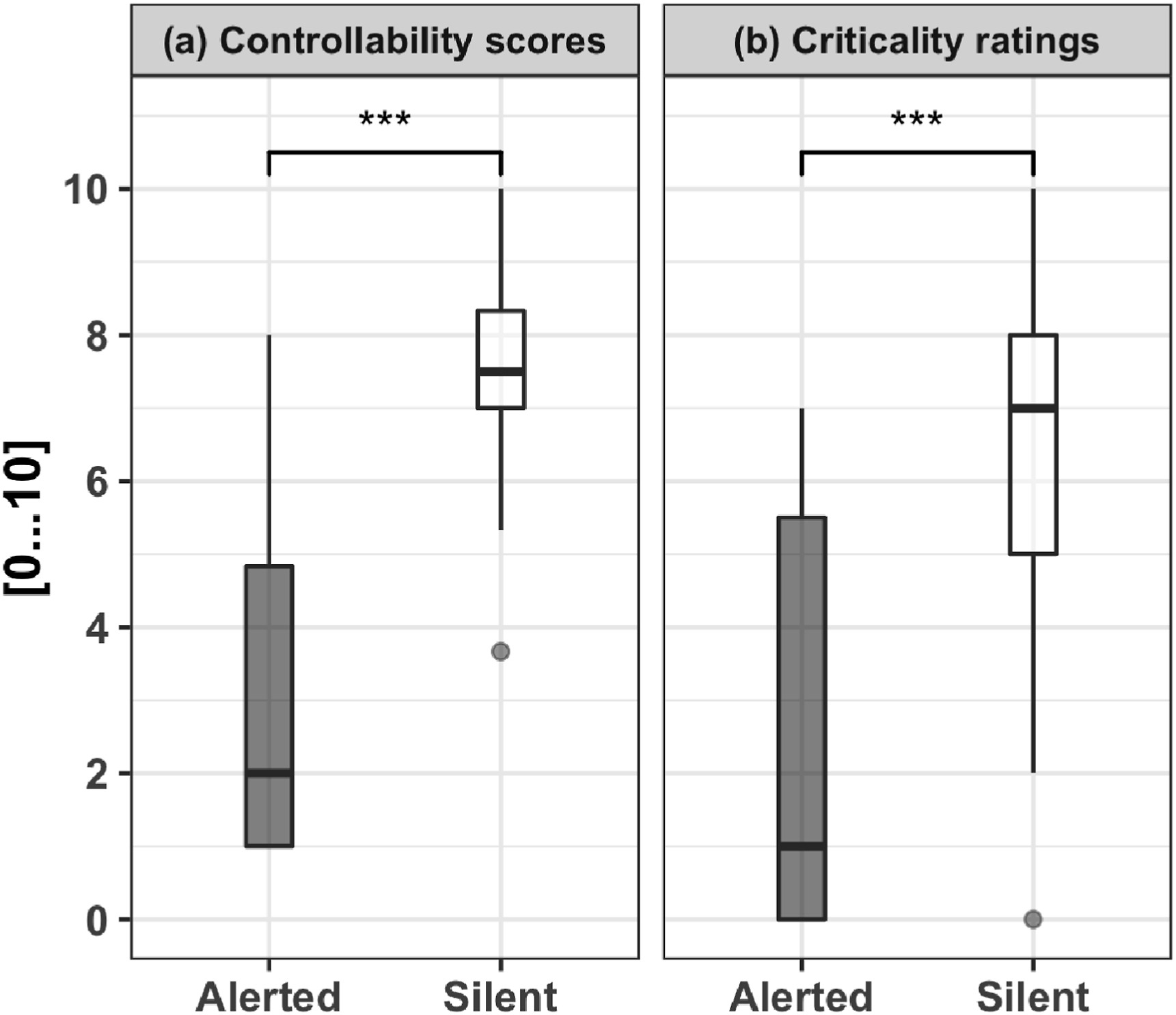
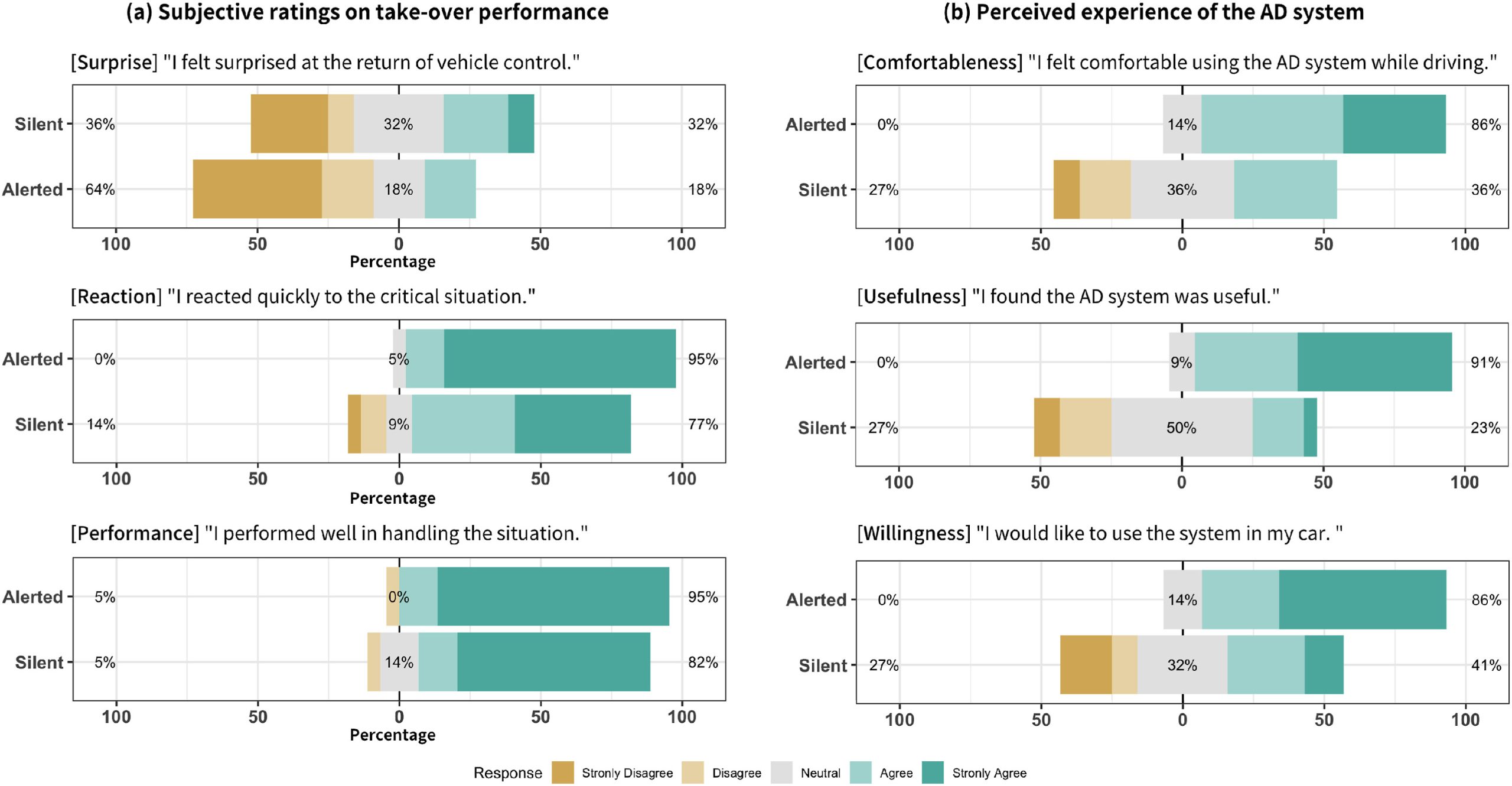
This study investigated how drivers can manage the take-over when silent or alerted failure of automated lateral control occurs after monotonous hands-off driving with partial automation. Twenty-two drivers with varying levels of prior ADAS experience participated in the driving simulator experiment. The failures were injected into the driving scenario on curved road segments, accompanied by either a visual-auditory alert or no change in HMI. Results indicated that drivers could rarely maintain lane-keeping when automated steering was disabled silently, but most drivers safely managed the alerted failure situation within the ego-lane. The silent failure yielded significantly longer take-over time and generally worse lateral control quality. In contrast, poor longitudinal control performance was observed in alerted conditions due to more brake usage. An expert-based controllability assessment method was introduced to this study. The silent lateral failure situation during monotonous hands-off driving was rated as uncontrollable, while the alerted situation was basically controllable. Participants showed their preferences for the TORs, and the importance of conveying TOR reasons was also demonstrated.
相关信息/Info
作者/Authors
链接/Link
Yiwen Zhang, Xinyan Zhou, Wenjia Wang, Yuanda Hu, Xiaohua Sun
https://www.sciencedirect.com/science/article/abs/pii/S0169814123000215
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}