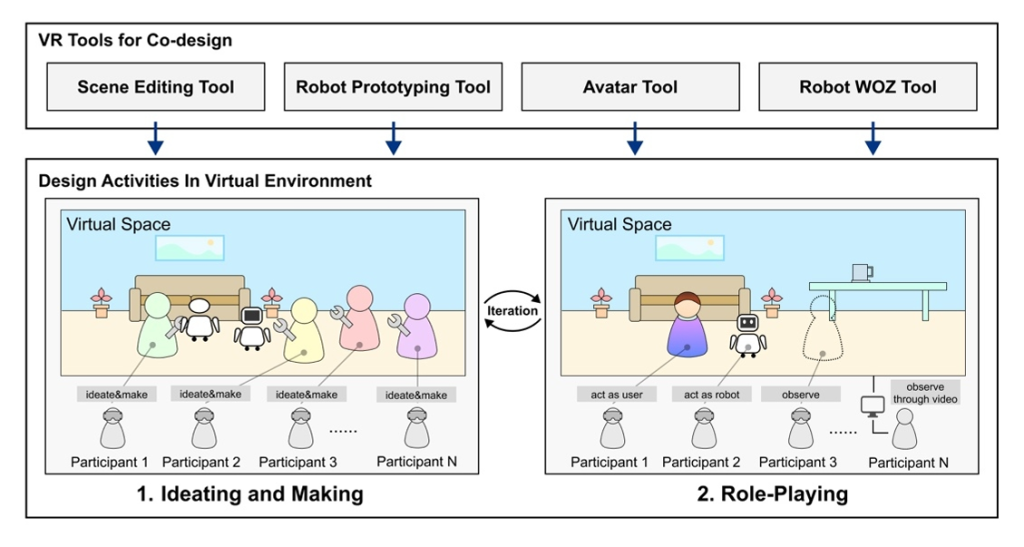
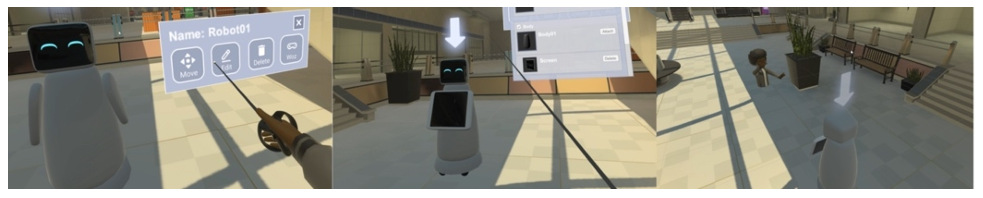
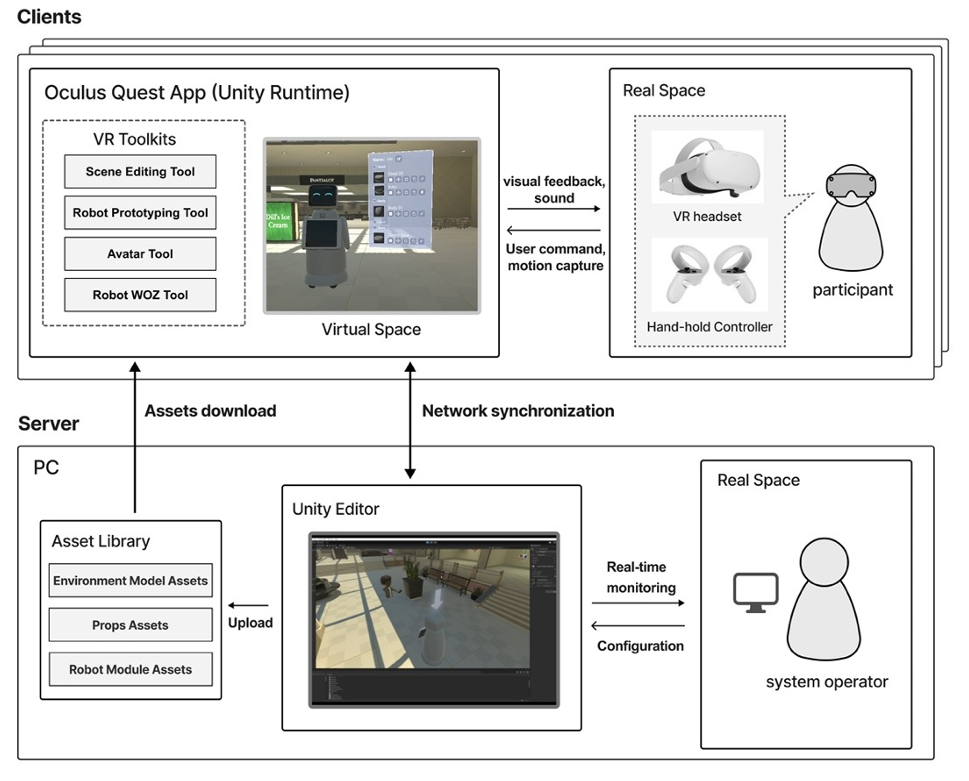
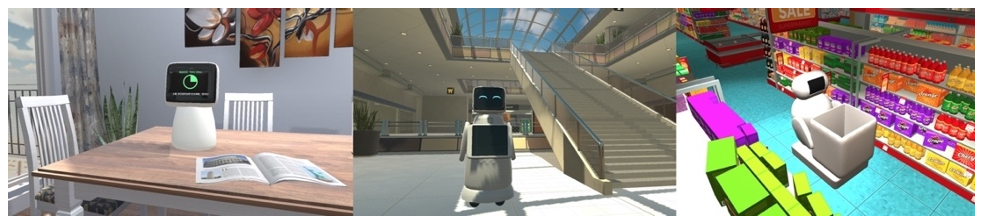
Service robots have been applied in an increasing number of scenarios, including homes, hospitals, offices, schools, hotels, etc. To ensure the usability of the interaction interface and process in the application of service robots, the design of human-robot interaction in the application of service robots involves various interaction modalities, different robot forms, and different physical behaviors of robots in space, etc. This makes it challenging to have low-cost, high-fidelity prototype methods that support design exploration in the early stages of service robot application design.Currently, many rapid prototyping techniques have been applied to the design exploration stage in the design of service robot applications, such as paper prototypes, storyboards, video prototypes, etc. However, these methods have limitations, including low fidelity and being out of the environmental context. Researchers have also been exploring new prototype methods to meet the design exploration and testing requirements for HRI design. Some studies have explored the use of VR test HRI prototypes, and most of them focus on the technical aspect, and the performance of HRI capabilities. Other studies focus on specific HRI design aspects: interactive mechanism, anthropomorphic appearance, social acceptance, and so on. Approaches focusing on these aspects are not suitable for prototyping and testing the overall interaction scenarios of service robot applications.Based on the characteristics of virtual reality technology, this paper aims to explore how virtual reality technology can be used to support multi-user collaborative design of service robot applications in a virtual environment. To address this issue, this paper proposes a system for supporting collaborative design of service robot applications. The system framework and implementation will be described in detail in the paper. Specifically, the system enables multiple users (designers or stakeholders) to enter a virtual environment in real-time using head-mounted VR devices. Users can select appropriate environment model assets based on the target application scenario and perform bodystorming “on site”. Using a modular robot building tool, users can add virtual robots to the space and add or delete functional components, as well as adjust the position, size, and orientation of the components. The system’s Wizard-of-OZ module allows users to control the robot’s movement and component status. The Graphic UI is embedded into the physical display of the robot via WebView and supports the simulation of the Graphic UI interaction process. After completing the initial application concept ideation and virtual robot design, users can use WoZ and Role-Playing techniques to perform the human-robot interaction process to evaluate and optimize the interaction design. In addition, the recorded video of the performance can also support subsequent design discussions.The system is implemented using the Unity game engine, and users interact with the system using the Oculus Quest headsets and controllers. The design activities case based on the system will be evaluated and discussed to analyze the strengths and weaknesses of the system. Further, we discuss the limitations of this work and the future research directions for supporting the design of service robot applications using virtual reality.

{kind=link}
{kind=link}
{kind=link}
{kind=link}